
Associate Professor Junliang “Julian” Tao (left) is working on a collaborative research project to design and develop below-ground sensing networks using robots that mimic burrowing animals and plants. Tao is shown here with 3D-printed early prototypes of a clam-inspired burrower. He is being assisted by Yong Tang (center) and Sichuan Huang (right), doctoral students in civil, environmental and sustainable engineering. Photographer: Erika Gronek/ASU
Burrowing sensor robots could unearth nature’s subterranean secrets
Robots are increasingly at work on land, at sea, in the air and out in space.
By Joe Kullman
Convergence magazine > Burrowing sensor robots could unearth nature’s subterranean secrets
Arizona State University engineers are working toward deploying robotic mechanisms in what might be the toughest environment the technology will encounter: underground.
“We want to make robots effective tools in a place where there are so many things that could stop them from working,” says Junliang “Julian” Tao, an associate professor of civil, environmental and sustainable engineering.
Tao has earned support from a National Science Foundation Early-Concept Grant for Exploratory Research Signals in the Soil to develop “paradigm-shifting platform technology” for “self-boring robots” from which new underground wireless sensing networks can be launched.
Tao is teaming with two other Fulton Schools researchers Daniel Aukes and Hamidreza Marvi to devise approaches for modeling, designing, prototyping and defining the essential technological characteristics of such networks using bio-inspired robots.
The new grant enables the team to develop sensors that can be integrated into robots capable of deploying themselves autonomously, and boring underground with little disturbance to the soil and minimal operational intervention by humans on the surface. The robots will also be able to change locations and return to the surface for maintenance as needed.
The robots will operate in wide-area subterranean sensing networks that will be especially valuable for evaluating the conditions of soils at sites where building foundations, dams, levees, tunnels, roads, irrigation systems and other infrastructure are to be constructed.
The system will enable more precise agricultural practices, ground contaminant monitoring and other environmental health assessments. Other benefits include more efficient below-ground geotechnical, biological and water studies and better predictive analysis of the vulnerability or resiliency of land to impacts from earthquakes or flooding.
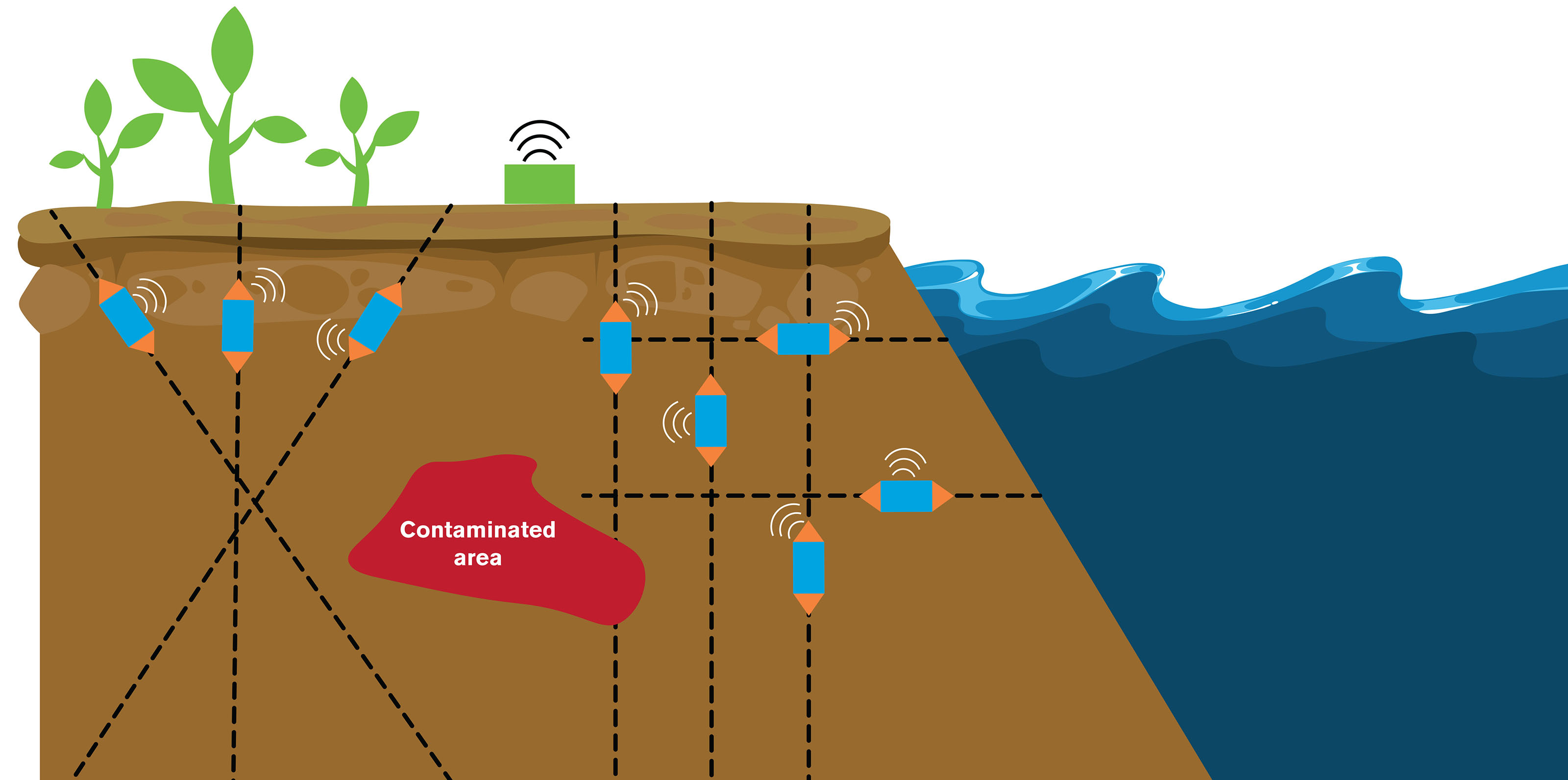
The illustration shows a schematic for specific applications of the underground wireless sensing networks being developed in the Signals in the Soil research project. Three applications of the networks enabled by self-boring sensor robots are precision agriculture, monitoring of soil contaminants and monitoring of infrastructure. The dashed lines indicate the traveling paths of the self-boring sensing nodes. Illustration courtesy of Junliang Tao
Achieving their goals hinges on the researchers devising sensor robots that can replicate the locomotive and penetrative capabilities of burrowing animals and plant life.
Specifically, they want self-boring robots that can mimic what moles, worms, clams, plant roots and seeds do in excavating, digging and undulating their way into and through sand, silt, clay and many other types of soils.
“It will take exceptionally flexible and robust robots,” explains Aukes, an assistant professor in the Polytechnic School. “They will be confronted with solid materials, liquids and gases, all the things that can foul traditional robots.”
Beyond refining the robotics and sensing technologies, the project requires making robots capable of a range of burrowing techniques optimally suited to navigating in soil, Marvi says.
The researchers are also tasked with developing a rapid prototyping method to systematically design and fabricate the robots that will be adaptable in underground environments.

Assistant Professor Daniel Aukes (second from left) discusses the design of a foldable robot with ASU engineering students (left to right) Roozbeh Khodambashi Emami, Mohammad Sharifzadeh and Azadeh Doroudchi. Aukes will bring his skills in robotics design and manufacturing and systems integration to a new project to develop networks of self-boring sensor robots for underground applications. Photographer: Jessica Hochreiter/ASU
The team will use 3D printing, materials science and soft robotics to find solutions using nontraditional materials, flexible elements and designs that enable navigation through granular mediums like soil and sand.
Tao wanted specific collaborators who would bring multiple areas of expertise to the endeavor.
Aukes has experience in robotics design, manufacturing and systems integration. Marvi, who is an assistant professor in the School for Engineering or Matter, Transport and Energy, has skills in bio-inspired technology, the mechanics of animal locomotion and soft robotics. Tao focuses on soil behavior, bio-inspired sensors and smart construction technologies.
The mix of capabilities and skill makes Tao confident the team can take a formidable step toward “revolutionizing” underground sensing technology.
They hope underground networks of bio-inspired, self-boring robotic sensors will reveal more secrets of nature to inspire new possibilities with the technology.